负责人:毛健
利用GNSS、CORS系统、RTK和INS等先进动态测量技术,以GPS/INS组合导航系统为研究对象,研制高精度实时动态测量系统,实现实时或事后地获取高精度的位置、速度、加速度、姿态和时间信息,广泛应用于陆地、海面或航空中的导航和测量。
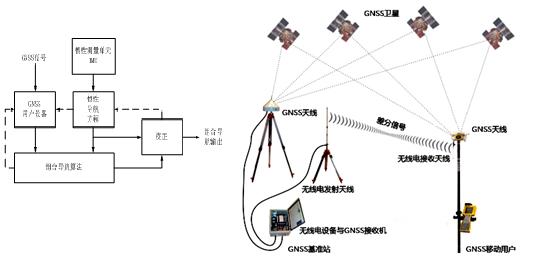
工程中心以GPS和INS的导航定位基本原理为基础,着重解决了系统的应用问题。研究了组合导航系统的误差模型,建立拉以伪距、伪距率为观测量的紧组合导航模型,提出增加姿态角观测量,建立姿态角误差量测模型,提高导航的姿态角精度、组合导航系统的位置和速度精度。
利用GPS/INS组合测姿系统实现了车辆与无人飞行器姿态测量。





